Creen un entorn virtual per a ensenyar a conduir als cotxes autònoms
23/01/2018
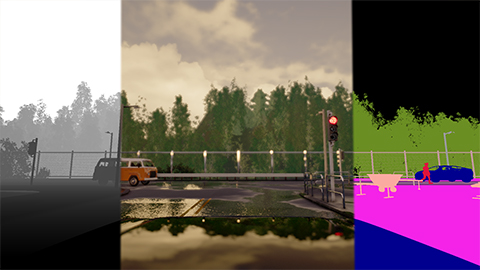
Forçar les situacions més estranyes o difícils de la conducció és l'objectiu d'aquest simulador. CARLA permet als investigadors generar qualsevol tipus de situació o condició imaginable perquè el cotxe aprengui com ha de reaccionar: la llum de la posta de sol, un accident a pocs metres o un vehicle circulant en contra direcció, per exemple. "CARLA ens permet conduir en diferents entorns, condicions de llum, canvis en la meteorologia o escenaris urbans", explica el Dr. Antonio López, un dels investigadors principals del projecte. Per a això, els investigadors han recollit dades de conductors reals dins de l’entorn, donant-li al vehicle un model al qual imitar.
Els avantatges d'aquest simulador són clars, ja que redueix les limitacions físiques d'entrenar un cotxe en un entorn real (una ciutat), amb els riscos que això inclouria, així com una rebaixa substancial en recursos i finançament. Més important, i tal com recullen a l’article científic associat al projecte, un sol vehicle està lluny de poder compilar les dades suficients per cobrir la multitud de casos o situacions que han de ser processades per un vehicle autònom. CARLA també proporciona a l’automòbil l’accés a informació privilegiada com les coordenades GPS, velocitat, acceleració, dades detallades sobre diferents infraccions, i la posició de tots els participants del transit.
El projecte va ser presentat a la First Conference in Robot Learning de Mountain View, California. Els investigadors esperen que CARLA, de codi obert i gratuït, serveixi perquè una àmplia comunitat participi activament en la investigació de la conducció autònoma.
Actualment, la tecnologia dels videojocs ja està àmpliament utilitzada per entrenar als cotxes autònoms. Tot i això, els simuladors de conducció de codi obert i gratuït són molt limitats i no disposen de molts dels elements més bàsics i imprescindibles per una conducció òptima, com poden ser els vianants, els senyals de trànsit, les interseccions o d’altres complicacions que poden sorgir durant la conducció real.
CARLA compta des dels seus inicis amb el suport d'Intel Visual Computing Lab. En una fase posterior també s'hi va afegir l'Institut de Recerca de Toyota.
Referència
Alexey Dosovitskiy, German Ros, Felipe Codevilla, Antonio Lopez, Vladlen Koltun. CARLA: An Open Urban Driving Simulator. Proceedings of Machine Learning Research, Volume 78 (2017) http://proceedings.mlr.press/v78/dosovitskiy17a/dosovitskiy17a.pdf
Més informació:
Video sobre el simulador CARLA