Crean un entorno virtual para enseñar a conducir a los coches autónomos
Investigadores del Centro de Visión por Computador (CVC) de la UAB, junto a Intel Visual Computing Lab, han creado CARLA, un entorno virtual de código abierto y gratuito capaz de generar situaciones realistas para desarrollar, entrenar y validar la conducción autónoma.
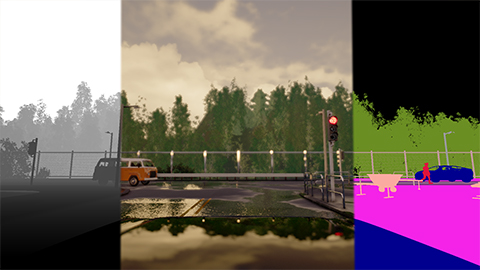
Las ventajas de este simulador son claras, ya que reduce las limitaciones físicas de entrenar un coche en un entorno real (una ciudad), con los riesgos que ello implicaría, así como una rebaja sustancial en recursos y fondos. Aún más, y tal como recogen en el artículo científico asociado al proyecto, un solo vehículo está lejos de poder compilar los datos suficientes para cubrir la multitud de casos o situaciones que deben ser procesadas por un vehículo autónomo. CARLA también proporciona al automóvil el acceso a información privilegiada como las coordenadas del GPS, velocidad, aceleración y datos detallados sobre distintas infracciones, y la posición de todos los participantes del tráfico.
El proyecto fue presentado en la First Conference in Robot Leaning de Mountain View, California. Los investigadores esperan que CARLA, de código abierto y gratuito, sirva para que una amplia comunidad participe activamente en la investigación de la conducción autónoma.
Actualmente, la tecnología de los videojuegos ya es extensamente empleada para entrenar a los coches autónomos. Aun así, los simuladores de conducción de código abierto y gratuito son muy limitados y carecen de muchos de los elementos básicos e imprescindibles para una conducción óptima, como pueden ser los peatones, las señales de tráfico, las intersecciones u otras complicaciones que pueden surgir durante la conducción real.
CARLA cuenta desde su inicio con el apoyo de Intel Visual Computing Lab. En una fase posterior també se ha añadido el Instituto de Investigación de Toyota.
Referencia
Alexey Dosovitskiy, German Ros, Felipe Codevilla, Antonio Lopez, Vladlen Koltun. CARLA: An Open Urban Driving Simulator. Proceedings of Machine Learning Research, Volume 78 (2017) http://proceedings.mlr.press/v78/dosovitskiy17a/dosovitskiy17a.pdf