

Detecció de vianants per a sistemes avançats d'assistència al conductor
Els sistemes d'assistència al conductor, i particularment els sistemes de protecció de vianants, representen un dels camps de recerca més actius dedicats a la millora de la seguretat viària. El major desafiament és el desenvolupament de sistemes a bord fiables de detecció de vianants. En aquesta revisió de l'estat de la tècnica de detecció de vianants, es divideix el problema en diferents etapes, cadascuna amb responsabilitats pròpies dins del sistema. Aquesta divisió facilita la posterior anàlisi i discussió de cadascun dels mètodes en la literatura, afavorint la comparació entre ells. Finalment es discuteixen els temes més importants d'aquest camp posant especial èmfasi en les necessitats actuals i en els reptes futurs.
Al llarg del segle XX els automòbils van experimentar un espectacular augment en la seva popularitat, la qual cosa finalment ha resultat en que els accidents de trànsit representen una important causa de morts. Segons estudis de Nacions Unides, cada any es produeixen 150.000 ferits i 7.000 morts a la Unió Europea, només en accidents vehicle-vianant. Amb l'objectiu de reduir aquestes estadístiques, tant la indústria de l'automòbil com la comunitat científica han investigat les possibles vies d'increment de la seguretat. Alguns exemples de les tecnologies desenvolupades són els cinturons de seguretat, el coixí de seguretat o els més recents sistemes electrònics d'estabilitat. Actualment el camp més prometedor és el dels sistemes d'assistència al conductor (en anglès advanced driver assistance systems, ADAS), els quals no només proporcionen informació útil sinó que fins i tot poden realitzar accions sobre el vehicle en cas de perill.
Aquest article presenta una revisió de l'estat de l'art en un tipus particular d'ADAS: els sistemes de protecció de vianants. La dificultat en la detecció de vianants ve donada principalment per la variabilitat en la seva aparença (diferents robes, mides, siluetes, etc.) Així com per l'entorn no-estructurat en què es troben (escenaris dinàmics com a conseqüència del propi moviment del vehicle així com el moviment de la resta d'objectes a la carretera). Les primeres investigacions en aquest camp es van dur a terme a la dècada de 1990, i fins al moment s'han presentat centenars de noves tècniques, algoritmes i sistemes. Una de les metodologies tradicionalment utilitzades per revisar la literatura en el camp ha estat la d'enumerar els articles un per un, analitzant els seus avantatges i desavantatges. Lamentablement aquesta aproximació al problema és llarga i poc concloent donada la quantitat de treballs. La nostra proposta consisteix en primer dividir els sistemes en una sèrie d'etapes genèriques, per després classificar i analitzar les tècniques en cadascuna d'aquestes. Això proporciona un esquema de comparació general sobre el qual es discuteix cada aspecte dels algoritmes al mateix temps d'acord amb el seu paper en el sistema.
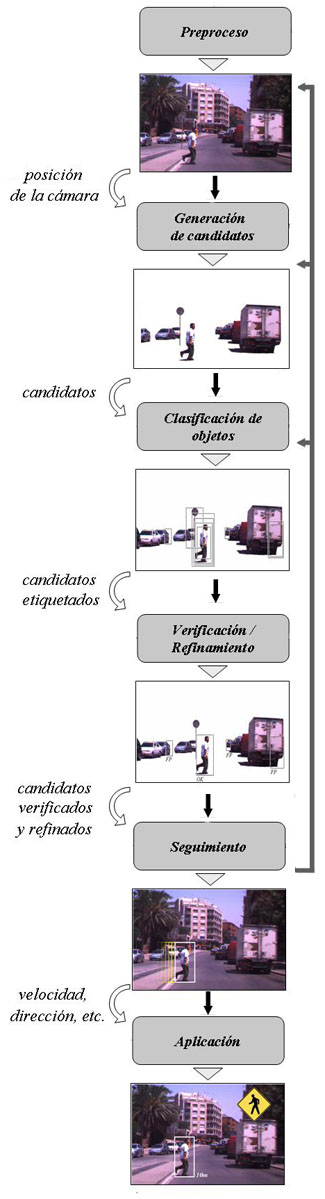
L'arquitectura proposta consisteix de sis etapes. A continuació enumerem cadascuna d'elles, al costat d'una breu descripció del seu rol en el sistema i la tècnica més emprades en aquestes.
• preprocés. Inclou tasques com l'ajustament del temps d'exposició o el calibratge de la càmera.
• Generació de candidats. Selecciona finestres d'interès en les que és molt possible que hi hagi un vianant, descartant la major part de fons però sense perdre vianants. Els principals algorismes actuals són la recerca exhaustiva, la recerca en el pla carretera i la segmentació estèreo.
• Classificació. Etiqueta les finestres candidates usant tècniques d'anàlisi de patrons. És potser l'etapa més investigada donat el seu solapament amb camps genèrics com la detecció i categorització d'objectes. S'empren algoritmes d'aprenentatge com xarxes neuronals, Adaboost o SVM, i característiques com els wavelets de Haar, histogrames de gradients, contorns o siluetes.
• Verificació i refinament. Verifica les finestres etiquetades com a vianant (generalment usats criteris com la silueta o el estèreo) i agrupa múltiples finestres solapades pertanyents al mateix vianant (l'algorisme de clustering Mean-Shift és un dels més populars).
• Seguiment. Segueix les finestres positives per estimar la seva direcció, velocitat així com la seva posició espacial en el futur. El filtre de Kalman és el més emprat en aquesta etapa.
• Aplicació. Proporciona decisions d'alt nivell fent ús de les dades de les anteriors etapes, per exemple alertar el conductor en cas de perill d'atropellament o frenar el vehicle.
La principal conclusió de la revisió és que encara que l'esforç realitzat durant l'última dècada en aquest camp ha estat realment productiu, encara estem lluny de del sistema ideal. Encara hi ha molta feina a fer fins a aconseguir el rendiment requerit per als sistemes en sèrie. Per exemple, s'han realitzat grans avenços en l'etapa de classificació, però la responsabilitat d'arribar a sistemes d'alta fiabilitat ha de ser també compartida pels algorismes de generació de candidats o de seguiment. De tota manera, atenent al desenvolupament en aquest camp, som optimistes respecte als seus futurs èxits.
Aquesta investigació ha estat portada a terme pels investigadors David Gerónimo, Antonio M. López i Angel D. Sapp del grup de sistemes avançats d'assistència al conductor (ADAS) del Centre de Visió per Computador (Universitat Autònoma de Barcelona) i Thorsten Graf del departament de Electronics Research de Volkswagen AG. La investigació ha estat finançada pels projectes TRA2007-62526/AUT, Consolider Ingenio 2010: MIPRCV, (CSD200700018) i la beca predoctoral BES-2005-8864 del Ministeri d'Educació i Ciència i el Fons Social Europeu.
Referències
"Survey of pedestrian detection for advanced driver assistance systems", D. Gerónimo, A.M. López, A.D. Sappa and T. Graf, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 32, Num. 7, pp. 1239-125, July 2010.
