

New strategy for optimising control systems
The great evolution that control systems have had in the last years, has brought the need to make a more precise control, taking into account all possible situations that can be presented. Within these possibilities, the control system's performance -aswell as the robustness- must be considered as important attributes that every control-loop has to consider.
From the performance side, considering the two possible modes of operation for the system, the requirements have to include good disturbance rejection (regulation-control) and set-point tracking(servo-control), what represents by itself a trade-off between these both considerations.
Moreover, if we look from the system's robustness point of view, due the process variations, it is an important aspect that should be included explicitly in the design stage. However, the accomplishment of the corresponding robustness specification is not always verified, therefore affecting the trade-off between performance and robustness.
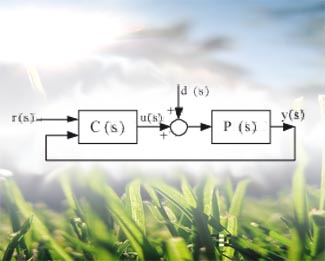
This thesis presents an approach that faces with a problem that takes into account the above considerations. The aim is to provide solutions to improve the general behavior of a control system, with a One-Degree-of-Freedom (1-DoF) Proportional-Integral-Derivative(PID) controller structure.
The proposal is focused from two points of view. In the first part, the analysis is conducted from the perspective of the operating mode (either servo or regulation mode) of the control-loop and tuning mode of the controller. When the operating mode is different from the one selected for tuning, the performance of the optimal tuning settings can be degraded. Obviously both situations can be present in any control system and in this context, a general approach for servo/regulation control is provided to improve the performance on both operation modes. This is formulated from the optimal controller parameters for set-point and regulation tuning methods, and looking for an intermediate tuning between these settings.
Considering the importance of robustness, in the second part the purpose is to design a control strategy that does not depend of the extreme tunings (for servo and regulation), and also that includes robustness considerations, in an explicit way. Therefore, it is formulated a combined servo/regulation index, to evaluate the system's performance, and incorporating a robustness constraint. The accomplishment of the claimed robustness is checked and then, the PID controller gives a good performance with also a precise and certain robustness degree.
The results conducted to several PID tunings, that use the robustness or the degradation of theperformance,asthedesignparameter. Inboth casestheaim istomeettheresulting selected value for the design, providing as much as possible the best value for the other characteristic (robustness or performance, dependingof the case).
As a main contribution, it is also presented a balanced performance/robustness PID tuning for the best trade-off, between the robustness increase and the consequent loss in the optimality degree of the performance.
References
"PID Control. Servo/regulation performance and robustness issues". PhD thesis defended by Orlando Arrieta Orozco, on september 2010. Director: Dr. Ramon Vilanova Arbós.